Escáneres ópticos 3D de mano en ingeniería inversa
![]()
![]()
Revisión | Review
Lucas García Menéndez; Manuel Domínguez-Somonte y María del Mar Espinosa-Escudero
Escuela Técnica Superior de Ingenieros Industriales (ETSII) de la Universidad Nacional de Educación a Distancia (UNED). Juan del Rosal 12, 28040 Madrid.
Recibido: 14 de febrero 2021 | Aceptado: 2 de mayo 2021 | Publicado: 29 de junio 2021
DOI: https://doi.org/10.25267/P56-IDJ.2021.i1.3
Introducción
En el campo del diseño mecánico, la ingeniería inversa supone el inicio de un proceso de rediseño, en el que un producto es observado, desmontado, analizado, probado, “experimentado” y documentado en términos de su funcionalidad, forma, fabricación y ensamblaje (Otto & Wood, 1998). Si bien dicho proceso de análisis se puede llevar a cabo con medios convencionales, la ingeniería inversa se ha popularizado gracias al desarrollo y proliferación de las técnicas de diseño asistido por ordenador y de escaneado 3D. Mientras que la ingeniería convencional transforma conceptos y modelos en componentes reales, en la ingeniería inversa los componentes reales son transformados en modelos y conceptos (Várady, Martin & Cox, 1997).
Los procesos de ingeniería inversa actuales se puede resumir en dos pasos: (1) adquisición de datos (medición) y (2) reconstrucción de superficies (Ameen, Al-Ahmari, & Mian, 2018). El objetivo de la adquisición de datos es recoger información tanto formal como dimensional de un objeto existente. El resultado de dicha medición suele estar representado como una nube de puntos (Figura 1).
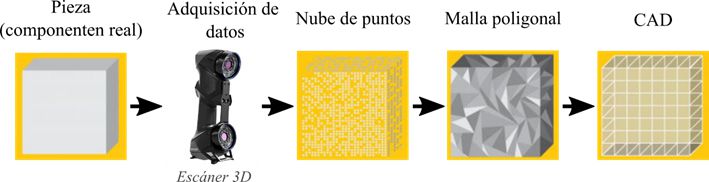
Figura 1. Proceso típico de ingeniería inversa en el campo del diseño mecánico.
La fase de reconstrucción de superficies incluye el pre-procesamiento de la nube de puntos para filtrar el ruido, conectar puntos adyacentes, reducir la redundancia y fusionar las nubes de puntos tomadas desde diferentes puntos de vista; la segmentación de la nube de puntos para ajustar los subconjuntos producto de la segmentación a superficies y, por último, la creación del modelo geométrico (Várady, Benkő, Kós, Renner, & Weiß, 1999).
Adquisición de datos en los procesos de ingeniería inversa
Existen diferentes técnicas de adquisición de datos en función de las necesidades concretas de cada aplicación y de la precisión que se desea obtener. Cabe destacar que la precisión de los datos obtenidos tiene gran impacto en los subsiguientes pasos del proceso de ingeniería inversa. Una medición incorrecta puede dar lugar a resultados inexactos y, en definitiva, a un fracaso del proceso de ingeniería inversa. Por lo tanto, es crucial que el método de adquisición de datos sea el adecuado para cada aplicación concreta (Ameen et al., 2018).
Las técnicas de adquisición de datos pueden clasificarse en técnicas con contacto y técnicas sin contacto. Como su propio nombre indica, las técnicas con contacto implican que una sonda toque la superficie del objeto del que se quiere obtener la información (Figura 2).

Figura 2. Máquina de medición por coordenadas
A su vez, las técnicas sin contacto pueden dividirse en dos categorías: activas y pasivas (Figura 3). Las técnicas activas basan su funcionamiento en la emisión de algún tipo de radiación, ya sea luz (métodos ópticos), sonido (sónar) o rayos X. Para obtener información sobre el cuerpo a escanear, se detecta el reflejo que la radiación emitida ha producido o, en algunos casos, la radiación que ha pasado a través de dicho cuerpo.
Por el contrario, las técnicas de adquisición de datos sin contacto pasivas se apoyan en instrumental que no emite ningún tipo de radiación por sí mismo, sino que se basan en la detección de la radiación ambiental. Debido a su fácil disponibilidad, se suele utilizar la luz como radiación ambiental.
Un ejemplo de técnica de adquisición de datos sin contacto pasivas es la fotogrametría, la cual permite obtener información tridimensional de un objeto a partir de una serie de fotografías del mismo. Si se trabaja con una foto, se puede obtener información de la geometría del objeto, es decir, información bidimensional. Si se trabaja con dos fotos, en la zona común a éstas (zona de solape), podremos tener visión estereoscópica; o dicho de otro modo, información tridimensional. En este principio básico se basan las técnicas de fotogrametría.
Para aplicaciones en el campo de la ingeniería inversa, es común el empleo de técnicas de adquisición de datos sin contacto, activas y emisoras de luz (ópticas). Los dispositivos basados en ese tipo de técnicas reciben el nombre de escáneres ópticos 3D (Kuş, 2009).
En el campo de la ingeniería inversa, dado que los objetos a escanear suelen ser de tamaño reducido, se busca que los dispositivos sean ligeros y fáciles de transportar y manejar, motivo por el cual han proliferado los escáneres de mano. En otras aplicaciones, como la construcción o la topografía, el principal requisito es el que el rango de escaneado sea muy amplio. Estos dispositivos suelen emplear la tecnología LiDAR lídar (ver más abajo), son de grandes dimensiones y requieren un trípode para mantener una posición estática.
Escáneres láser de mano
La mayoría de dispositivos de este tipo basan su funcionamiento en alguna de las tres técnicas de escaneado óptico mostradas en la Figura 3: triangulación, luz estructurada y, en menor medida, lídar. A continuación, se detalla el funcionamiento de estas tres tecnologías y se analizan las principales características y especificaciones de los dispositivos más avanzados de cada categoría.
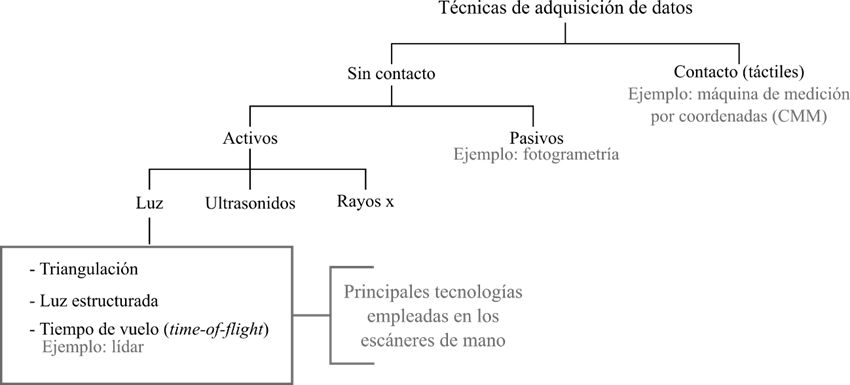
Figura 3. Resumen de las técnicas de adquisición de datos en ingeniería inversa.
Triangulación
En este método se proyecta un rayo láser sobre el sujeto y, a través de una cámara, se detecta la ubicación del punto donde incide el mismo. Dependiendo de la distancia que recorre desde el emisor hasta alcanzar la superficie del objeto, el punto aparece reflejado en diferentes posiciones del sensor de la cámara. Esta técnica recibe el nombre de triangulación porque el punto del objeto donde incide el láser, la cámara y el emisor láser forman un triángulo (Figura 4).
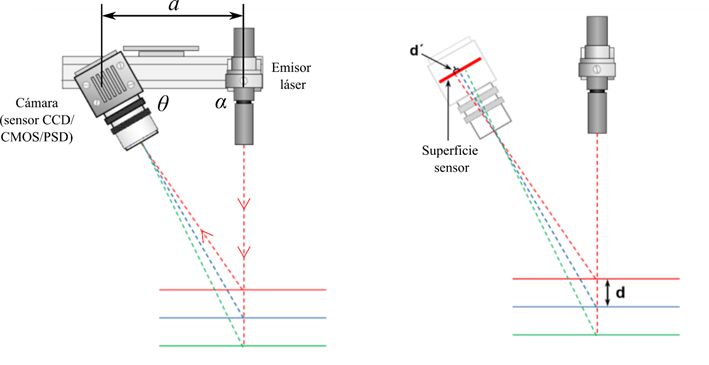
Figura 4. Esquema de la tecnología de triangulación láser (MoviMED, s. f.).
Tanto la longitud del lado a del triángulo (distancia entre la cámara y el emisor láser) como el ángulo en el vértice donde se encuentra el emisor láser (α)son conocidos. Además, el ángulo en el vértice correspondiente a la posición de la cámara (θ) se puede determinar en base a la ubicación del punto donde incide el láser en el objeto. Estos tres datos definen completamente tanto la forma como el tamaño del triángulo y proporcionan la ubicación del vértice correspondiente al punto de contacto entre el láser y el objeto (França, Gazziro, Ide, y Saito, 2005)(Li, Wang, y Fu, 2016).
Las líneas de colores de la Figura 4 muestran cómo el láser reflejado incide en diferentes puntos del sensor de la cámara en función de la distancia entre el emisor láser y la superficie del objeto. El punto en el que el láser reflejado incide en el sensor (cámara) depende de la posición vertical del objeto respecto al conjunto emisor láser/cámara. Como muestra la Figura 4, la variación de posición vertical del objeto (d) produce cambios proporcionales en la posición del sensor donde se refleja el láser (d’).
El método de triangulación expuesto supone una forma efectiva de calcular la distancia entre el sensor (cámara) y un punto del objeto. Si se miden varios puntos se podría obtener información de un perfil o un área, pero sería un proceso largo y poco eficiente. Para este tipo de aplicaciones se emplean sistemas que proyectan una o varias líneas laser sobre la superficie objetivo (Figura 5). La línea láser reflejada en el sensor proporciona una sección transversal del objeto a escanear (MoviMED, s. f.).
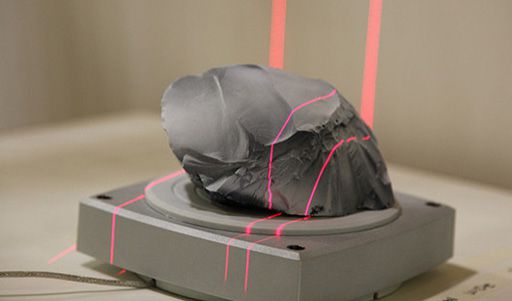
Figura 5. Escaneado mediante triangulación (Alexandrea, 2017)
Los escáneres basados en el método de triangulación son ampliamente utilizados en ingeniería inversa y en reconstrucción del patrimonio artístico. Cabe destacar que estos dispositivos cuentan con un rango de escaneado pequeño, por lo que son adecuados para objetos cercanos. En (Lv et al., 2018), se emplea el escáner Creaform EXAscan para digitalizar una tetera. Dada la geometría característica de dicho objeto, capturar su forma con exactitud a través de métodos tradicionales sería muy difícil, por lo que se resalta la idoneidad de las técnicas de escaneado láser en el campo de la ingeniería inversa. En (Ion et al., 2017), el mismo dispositivo es utilizado para la reconstrucción de los complejos estucos del edificio Nanu-Muscel de Bucarest.
Las principales ventajas de la tecnología de triangulación láser son la resolución y la precisión en distancias cortas. Además, el diseño de los dispositivos que emplean esta tecnología es simple, por lo que suelen tener un coste más bajo que el resto. Se debe tener en cuenta que las propiedades de la superficie a escanear tienen un gran efecto en el proceso. Las superficies muy brillantes o transparentes pueden ser problemáticas y comprometer la calidad de los datos adquiridos. En menor o mayor medida, la dificultad para escanear superficies brillantes es común a todos los escáneres, independientemente de la tecnología en la que estén basados.
Un ejemplo de escáner cuyo funcionamiento se base en esta técnica es el Creaform HandyScan BLACK Elite (Figura 6). Desarrollado por la empresa canadiense Creaform en 2019 (Creaform, s. f.), este dispositivo pertenece a la línea de escáneres de mano Handyscan. Proyecta once cruces de láser azul sobre el objeto a escanear. Además, cuenta con un modo de láser simple que permite escanear zonas con dificultad de acceso, como agujeros y cavidades.
Una de las características más destacables del HandyScan BLACK Elite es su capacidad para crear una malla del objeto escaneado en tiempo real. De este modo, el usuario tiene una óptima visualización del progreso durante el proceso de escaneado. En cuanto a las especificaciones técnicas, tiene una velocidad de adquisición de datos de 1.300.000 puntos por segundo y puede escanear piezas de entre 0,05 y 4 m con una precisión de 0,025 mm.

Figura 6. Creaform HandyScan BLACK Elite
El láser azul permite obtener mejores resultados a la hora de escanear objetos de ciertos materiales o acabados superficiales. Por ejemplo, los metales candentes, emiten luz en las longitudes de onda en las que operan los láseres rojos, impidiendo que se logren mediciones estables. En algunos casos, la luz emitida puede llegar a tal punto que la medición láser falle por completo.
Sin embargo, la longitud de onda del láser azul es más corta (Figura 7), por lo que está más lejos de la parte roja del espectro visible. Por este motivo, no le afecta la luz emitida por el metal, consiguiendo así una medición más estable.
Al escanear materiales orgánicos, transparentes o translúcidos (como, por ejemplo, plásticos), el láser rojo penetra más en la superficie del objeto, creando un punto desenfocado y borroso. Esto se traduce en una medición inexacta y poco fiable. Por el contrario, debido a su corta longitud de onda, el láser azul no penetra en el objeto, proyectando un punto enfocado y muy pequeño que proporciona una medición estable y precisa.
Figura 7. Espectro de luz visible que puede percibir el ojo humano (Becerra, 2019).
Por último, el láser azul es recomendable a la hora de escanear superficies pulidas o brillantes. Ante superficies de este tipo, la luz roja se distorsiona y aumenta el ruido de la señal detectada. Nuevamente, la corta longitud de onda de la luz azul es la responsable de su buen funcionamiento.
Sin embargo, la mayor intensidad del láser rojo hace que sea adecuado a la hora de escanear superficies mates u objetos en movimiento (Jones, 2016).
Luz estructurada
Los escáneres basados en el uso de luz estructurada están compuestos de una o más cámaras y un proyector que plasma un patrón (en la mayoría de los casos compuesto de rayas) sobre el objeto que se desea escanear. La superficie de dicho cuerpo deforma el patrón proyectado, de tal forma que las rayas se adaptan a la curvatura del objeto (Figura 8).
El escáner, a través de las cámaras, captura el patrón distorsionado y elabora un modelo 3D a partir de él. Dependiendo del grosor de las rayas, el escáner determina la distancia a un punto del objeto, ya que cuanto más lejos esté menor será el grosor de las rayas. Por el contrario, cuanto más cerca esté el objeto, mayor será el grosor de las rayas del patrón deformado. Para mejorar la precisión y calidad de la medición, se proyectan varios patrones con diferentes composiciones sobre el objeto (entre 3 y 10 patrones diferentes por cada punto de vista).
Una de las principales desventajas de esta técnica de escaneo es que no es adecuada cuando el objeto presenta superficies reflectantes. La forma en que la luz incidente se refleja en el objeto a escanear es la principal fuente de información en este tipo de escáneres, por lo que cualquier interacción inesperada entre la luz y el objeto causará problemas en la adquisición de datos. Las superficies transparentes pueden provocar la pérdida de detalles en el modelo, y las superficies reflectantes pueden hacer que la luz se refleje lejos de la cámara (Wang & Feng, 2016).
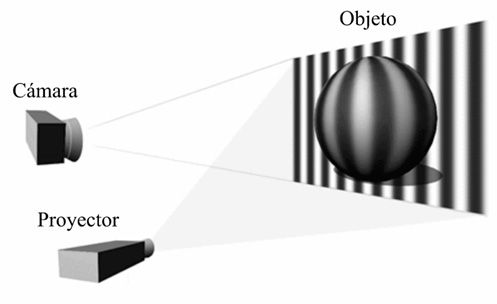
Figura 8. Esquema de la tecnología de luz estructurada.
En comparación con la triangulación láser, la luz estructurada ofrece una velocidad de escaneado mucho más alta. Debido a la rapidez de adquisición de datos, este tipo de dispositivos son menos tendentes a inexactitudes debidas a perturbaciones ambientales. La principal desventaja de esta tecnología es su alta sensibilidad a las condiciones de luz del entorno, lo que dificulta su uso en el exterior.
Un ejemplo de esta técnica es el FARO Freestyle 2 (Figura 9). Introducido en 2020, el Freestyle 2 es el último modelo de la línea de escáneres de mano de la empresa FARO Technologies (FARO, s. f.).
Este dispositivo cuenta con: un proyector láser que emite una red de puntos (matriz), dos cámaras encargadas de leer dicha red de puntos, una cámara a color para capturar los fotogramas y 3 diodos emisores de luz led para iluminar el entorno. Además, requiere que el usuario porte un ordenador móvil de pequeño tamaño.

Figura 9. FARO Freestyle 2
LiDAR o Time of Flight (ToF)
Un lídar (acrónimo del inglés LiDAR, Light Detection and Ranging o Laser Imaging Detection and Ranging) es un dispositivo que, gracias a un haz de luz láser pulsado, es capaz de determinar la distancia desde un emisor láser a un objeto o superficie.
Es una tecnología basada en el cálculo del tiempo de vuelo. La distancia se obtiene midiendo el tiempo que tarda el haz de luz desde su emisión hasta que rebota en la superficie y es detectado por el sensor. A partir de este tiempo, y teniendo en cuenta que la velocidad de la luz es una constante conocida, se obtiene la distancia entre el emisor láser y el objeto.
La tecnología LiDAR permite el escaneado de rangos muy amplio, por lo que se suele utilizar en escáneres no portables de mayores dimensiones. Sin embargo, en los últimos años han salido al mercado los primeros escáneres de mano que emplean tecnología LiDAR.
Dado que el rango de escaneado de los dispositivos basados en LiDAR es mucho mayor que el de aquellos que emplean las tecnologías anteriores, se utilizan en campos como la topografía, ingeniería, arquitectura y construcción.
A diferencia de los escáneres de triangulación láser, los LiDAR miden la distancia a un punto de cada vez. Para escanear todos los puntos de su campo de visión, el escáner desplaza el láser formando una bóveda de 360º en horizontal y 270º-300º en vertical.
Como hemos visto, los escáneres LiDAR miden el tiempo que tarda el haz de luz desde su emisión hasta que rebota en la superficie y es detectado por el sensor. Cuando los objetos están cerca del emisor, este tiempo es muy pequeño y, por tanto, difícil de medir. Por este motivo, a la hora de escanear objetos cercanos, son menos precisos que los dispositivos basados en triangulación láser o luz estructurada.
Un ejemplo de esta técnica es el Leica BLK2GO (Figura 10). Fundada en Suiza en 1819, Leica Geosystems es una empresa que desarrolla su actividad en los sectores de la medición y la topografía. En su catálogo actual cuenta con un solo escáner de mano, el Leica BLK2GO. Este dispositivo, lanzado al mercado en 2019, captura imágenes y nubes de puntos en tiempo real. Combina un sistema LiDAR de doble eje con una tecnología de localización y asignación simultánea, la cual permite registrar su trayectoria de movimiento. Dicho sistema consiste en un grupo de algoritmos que procesan datos capturados a través de múltiples sensores (fuentes de información), tales como: unidades de medición inercial (las cuales, a su vez, están formadas por una combinación de sensores), LiDAR 2D o 3D, imágenes, etc. En el ámbito del escaneado 3D, los algoritmos SLAM combinan y utilizan los datos recogidos de estas fuentes de información para registrar la posición del escáner y, al mismo tiempo, construir una nube de puntos 3D del entorno escaneado. Al igual que la mayoría de escáneres láser de mano, este dispositivo no requiere señal de geoposicionamiento por satélite (GPS) para su funcionamiento, lo que permite su utilización en lugares extremadamente remotos.
El Leica BLK2GO combina una unidad de medición inercial, una cámara de 12 Mpx y tres cámaras de 4,8 Mpx que permiten la navegación visual, la coloración de la nube de puntos y la captura de imágenes panorámicas (Piniotis, Soile, Bourexis, Tsakiri, & Ioannidis, 2020). El rango de escaneado, principal ventaja de este equipo, es de 25 m (0’Neill, 2020). De los tres dispositivos analizados en el presente artículo, el BLK2GO cuenta con el mayor alcance.

Figura 10. Leica BLK2GO.
A continuación, se recogen en la Tabla 1 las ventajas, desventajas y campos de aplicación de las tres tecnologías.
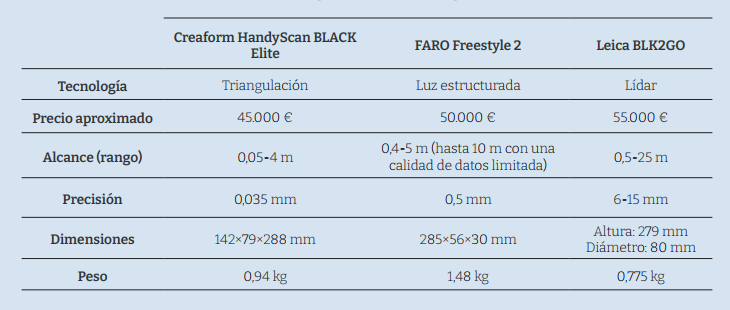
Cabe destacar que el análisis comparativo de la Tabla 1 es orientativo, ya que existen dispositivos que, a pesar de emplear la misma tecnología, cuentan con especificaciones técnicas muy diferentes. Por este motivo, en la Tabla 2 se reúnen algunas de las características más relevantes de los tres dispositivos analizados en el presente artículo.
Tabla 1. Análisis comparativo entre las 3 tecnologías descritas.
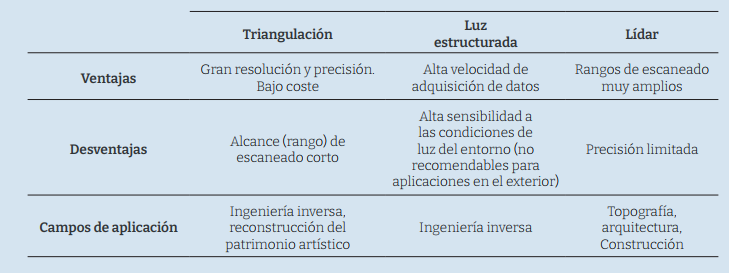
Tabla 2. Análisis comparativo entre los 3 dispositivos analizados.
Los escáneres escogidos para el análisis representan, dentro de cada tecnología, algunas de las opciones más avanzadas y sobresalientes del mercado. Lógicamente, esto se ve reflejado en el precio de los equipos. Sin embargo, teniendo en cuenta la gran variedad de escáneres desarrollados en los últimos años, existen opciones más económicas que, dependiendo de la aplicación, pueden ser consideradas. Un ejemplo de escáner láser de mano de bajo coste es el Peel 3D peel 2, el cual tiene un precio aproximado de 7.500 €. Basado en luz estructurada, cuenta con una precisión de 0,25 mm y un rango de escaneado de entre 0,3 y 3 m.
A pesar de que este artículo se centra en los escáneres ópticos de mano, cabe mencionar la fotogrametría como alternativa al escaneado láser. La fotogrametría supone un método de adquisición de datos muy popular en el campo de la ingeniería inversa ya que, desde el punto de vista del hardware, el principal requisito es una cámara fotográfica.
Posicionamiento del escáner
El método de posicionamiento de un escáner 3D se define como la forma en que un sistema captura el espacio tridimensional y alinea los datos recogidos durante los diferentes escaneos. Existen varios métodos para determinar la posición de un escáner 3D. En el caso de los brazos de medición, la posición del extremo del brazo (dónde se encuentra un puntero o un cabezal de escaneado 3D) se determina a través de sensores (codificadores mecánicos o encoder) integrados en el brazo. Los brazos de medición necesitan estar fijados a una superficie, es decir, requieren un enlace físico (brazo) para posicionar su extremo (Figura 11a).

Figura 11. Brazo de medición (izquierda) y sistema óptico de posicionamiento (derecha).
Otros escáneres emplean sistemas ópticos para determinar su posición. Este método consta de dos elementos: un rastreador óptico fijo montado sobre un trípode y un escáner 3D que es manipulado por el usuario. El escáner es posicionado en el espacio en tiempo real gracias a las cámaras del rastreador. A pesar de que no se requiere una unión mecánica entre el escáner y el rastreador óptico, siempre debe existir una línea de visión clara y directa entre los dos dispositivos (Figura 11b).

Figura 12. Posicionamiento mediante dianas situadas en la superficie escaneada.
Los escáneres de mano recogen los datos en relación a un sistema de coordenadas interno. Teniendo en cuenta que el escáner está en movimiento, es necesario determinar la posición del mismo para poder utilizar los datos capturados. Para ello, utilizan un sistema de auto-posicionamiento. El escáner utiliza el objeto a escanear como referencia para su posicionamiento. Por tanto, a diferencia de los métodos de posicionamiento anteriores, no se requiere ningún dispositivo externo. Esto se traduce en una reducción del tiempo de preparación de escaneado y en una mayor facilidad de trabajo en entornos complejos o de difícil accesibilidad.
Los escáneres de mano utilizan cámaras para conseguir una visión estereoscópica, es decir, son capaces de integrar dos imágenes en una sola para crear una imagen tridimensional. Esto permite que el dispositivo determine su posición en relación a puntos específicos, los cuales pueden ser dianas de posicionamiento o características del objeto. Además, existen escáneres de posicionamiento híbrido, los cuales combinan la precisión del posicionamiento mediante dianas con la flexibilidad del posicionamiento mediante características del objeto escaneado.
En el posicionamiento mediante dianas, se colocan puntos de posicionamiento antes de iniciar el proceso de escaneado (Figura 12), ya sea sobre el objeto a escanear o, en el caso de un objeto de dimensiones reducidas, alrededor del mismo. Las dianas suelen adhesivas y tienen una geometría simple específicamente diseñada para ser detectada por el escáner. El escáner determina la posición relativa de cada diana detectada. Para lograr un posicionamiento preciso, se debe tener un mínimo de 3 dianas en el campo de visión. A medida que el escáner se mueve alrededor de la pieza, se detectan nuevas dianas y se registran en el modelo de posicionamiento global.
Algunos escáneres utilizan las características del objeto a escanear (sus atributos de forma y textura) para su posicionamiento. A medida que se adquieren los datos, el dispositivo detecta y registra formas y texturas en el área escaneada. Al escanear desde otra posición, las características detectadas se comparan con las previamente registradas para hacer coincidir las capturas y determinar la posición del escáner. Las características del objeto escaneado deben ser lo suficientemente prominentes para ser detectadas con precisión.
Además, existen un método de posicionamiento híbrido, en el cual el usuario compensa la falta de características en un objeto determinado añadiendo dianas de posicionamiento.
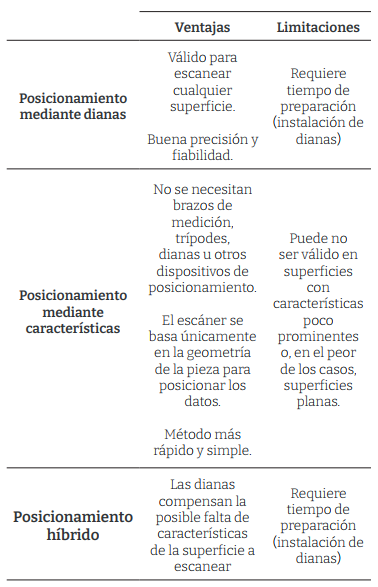
El posicionamiento mediante dianas proporciona los resultados más precisos y fiables, pero se debe tener en cuenta el tiempo invertido en la colocación de las dianas. Por otro lado, el posicionamiento mediante características del objeto es el método más rápido y simple, pero los datos obtenidos tienen una precisión menor (Allard & Lavoie, 2014).
A continuación, se recogen las ventajas y limitaciones de los tres métodos de auto-posicionamiento empleados en los escáneres ópticos 3D de mano (Tabla 3).
Tabla 3. Ventajas y limitaciones de los tres métodos de auto-posicionamiento.
Conclusiones
Las técnicas de escaneado láser tienen un gran número de aplicaciones, entre las que destaca la ingeniería inversa. Una parte fundamental en cualquier proceso de ingeniería inversa es la adquisición de datos. Los avances tecnológicos de los últimos años han hecho posible que los dispositivos de escaneado láser 3D cada vez sean más pequeños, ligeros y fáciles de usar. Se podría considerar el desarrollo de los escáneres láser de mano como el punto culminante de los avances en la portabilidad de los dispositivos.
El presente artículo describe las tres técnicas de escaneado láser más significativas: triangulación, luz estructurada y lídarLiDAR. Además, incluye ejemplos de los escáneres de mano más avanzados disponibles actualmente en el mercado. Se ha analizado el estado actual de esta tecnología unificando los diferentes principios de funcionamiento de los dispositivos más relevantes entre los actuales.
Teniendo en cuenta el análisis realizado, se puede concluir que los dispositivos basados en triangulación láser y los basados en luz estructurada tienen unas características técnicas muy similares, por lo que ambos comparten el mismo campo de aplicación.
Por otro lado, los escáneres de mano basados en tecnología lídar LiDAR cuenta con un rango de escaneado mucho mayor (en dispositivos móviles, puede llegar hasta los 250m), por lo que su campo de aplicación es diferente al de los anteriores. Sin embargo, en un caso real, habría que conocer con profundidad la aplicación para determinar cuál sería la tecnología más adecuada.
Referencias
Alexandrea, P. (2017). The Complete Guide to 3D Scanners using Laser Triangulation - 3Dnatives. Recuperado 2 de mayo de 2021, de 3Dnatives website: https://www.3dnatives.com/en/3d-scanner-lasertriangulation080920174- 99/
Allard, P. H., & Lavoie, J. A. (2014). Differentiation of 3D scanners and their positioning method when applied to pipeline integrity. NDT 2014 - 53rd Annual Conference of the British Institute of Non-Destructive Testing, (418).
Ameen, W., Al-Ahmari, A. M., & Mian, S. H. (2018). Evaluation of handheld scanners for automotive applications. Applied Sciences (Switzerland), 8(2). https://doi.org/10.3390/ app8020217
Becerra, F. (2019). Patrones de Conducta Facial para Identificar Accesos Informáticos no Autorizados. https://doi.org/10.13140/ RG.2.2.11400.67845
Creaform. (s. f.).Creaform launches Handyscan black: the ultimate reference in portable metrology. Recuperado 2
de diciembre de 2020, de https://www.creaform3d.com/en/news/creaformlaunches-handyscan-black-ultimatereference-portable-metrology
FARO. (s. f.). FARO lanza el escáner 3D portátil Freestyle 2. Recuperado 2 de diciembre de 2020, de https://www.faro.com/es-es/news/faro-lanza-el-escaner-3d-portatilfreestyle-2/
França, J. G. D. M., Gazziro, M. A., Ide, A. N.,& Saito, J. H. (2005). A 3D scanning system based on laser triangulation and variable field of view. International Conference on Image Processing, ICIP, 1, 425-428. https://doi.org/10.1109/ICIP.2005.1529778
Ion, R. M., Gurgu, V., Bucurica, I. A., Teodorescu, S., Ion, M. L., Postolache, D., & Darida, I. (2017). 3D-Reconstruction of the Complex Stuccoes from Patrimony Buildings. Digital Presentation and Preservation of Cultural and Scientific Heritage, 7(September), 107-112.
Jones, C. (2016). Red vs Blue Lasers: A Comparison of Triangulation Sensors.Recuperado 27 de marzo de 2021, de https://www.automation.com/en-us/
articles/2016-2/red-vs-blue-lasers-acomparison- of-triangulation-s
Kuş, A. (2009). Implementation of 3D optical scanning technology for automotive applications. Sensors, 9(3), 1967-1979. https://doi.org/10.3390/s90301967
Li, X. Q., Wang, Z., & Fu, L. H. (2016). A laserbased measuring system for online quality control of car engine block. Sensors (Switzerland), 16(11). https://doi.org/10.3390/s16111877ç
Lv, S., Zhu, Y., Ni, H., Wang, X., Huang, T., & Zhang, J. (2018). Teapot three-dimensional geometrical model reconstruction
MoviMED. (s. f.). What is Laser Triangulation? Recuperado 12 de noviembre de 2020, de https://www.movimed.com/knowledgebase/what-is-laser-triangulation
Otto, K. N., & Wood, K. L. (1998). Product evolution: a reverse engineering and redesign methodology. Proceedings of the ASME Design Engineering Technical Conferences and Design Theory and Methodology Conference (DETC’96), 1-15.
Piniotis, G., Soile, S., Bourexis, F., Tsakiri, M., & Ioannidis, C. (2020). Experimental assesment of 3D narrow space mapping technologies. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives, 43(B2), 149-156. https://doi.org/10.5194/